

INTRODUCTION
i. Equipped with x86 architecture, supporting controllers with different performances ii. Equipped with Gigabit Ethernet interface, supporting interactive visual positioning information, and realizing real-time tracking iii. Equipped with EtherCAT bus communication protocol interface, high real-time performance, supporting various network topologies iv. Equipped with high-performance processor, with powerful computing power, meeting the robot's high-speed, high-precision, and high-stability control requirements v. Using self-developed modular programming language, while integrating soft PLC, supporting ST, 1L, LD, FBD, SFC language programming in accordance with IEC61131-3 standard, efficient and flexible writing of complex control programs vi. Supporting large-capacity variable processing of up to 1GB, supporting data collection, processing bus diagnosis, timeout monitoring, and WatchDog monitoring while the controlled equipment is running
FEATURE
Fully self-developed controller, deeply compatible with Delta and SCARA robots, universally compatible with other types of robots Supports EtherCAT high-speed bus, and can expand EtherCAT CoE communication equipment
SPECIFICATION
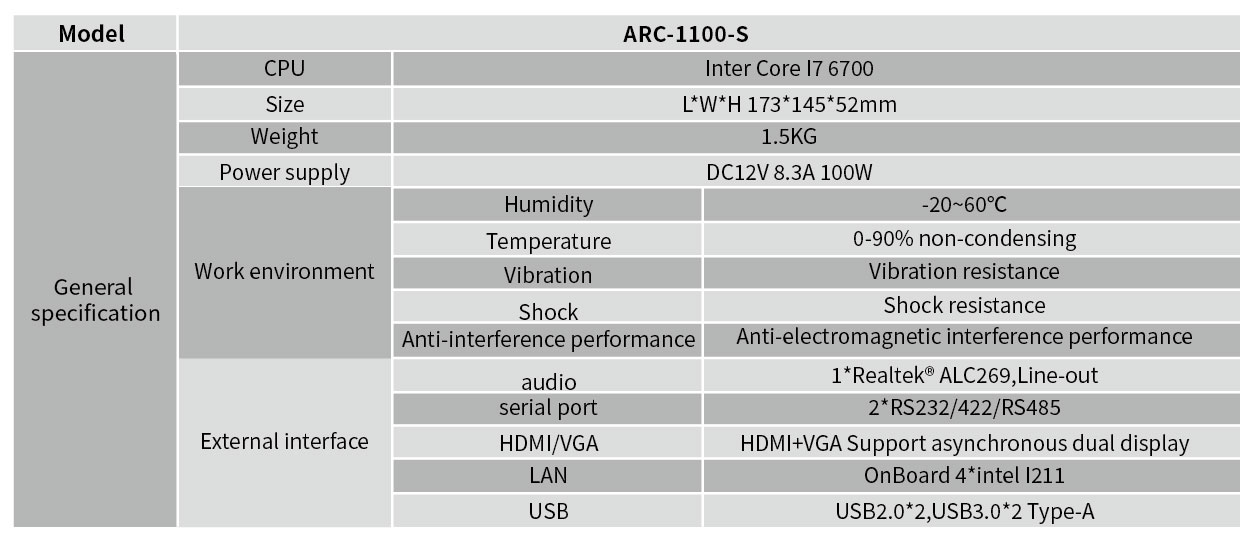
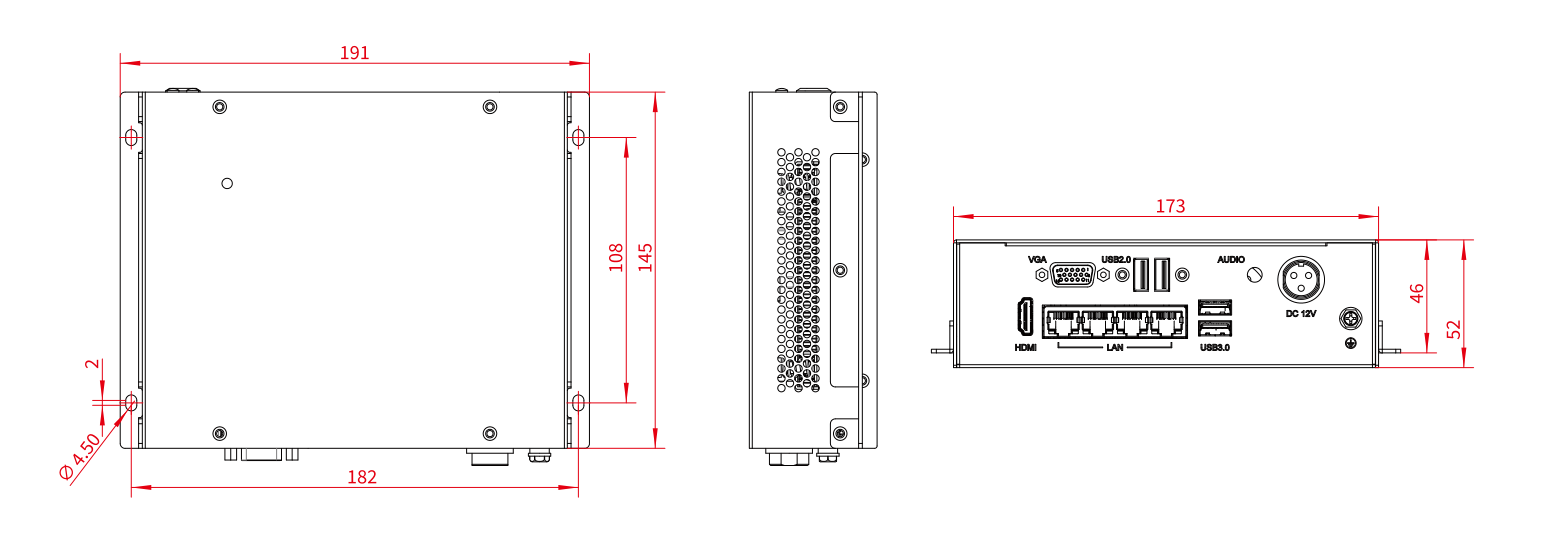
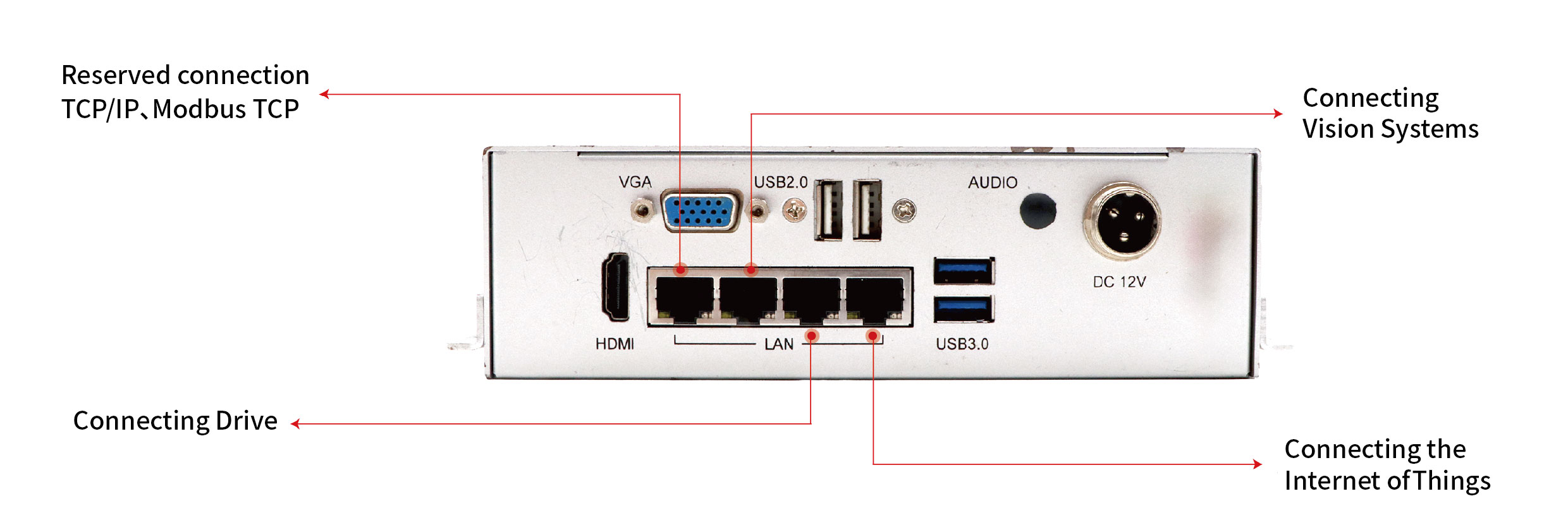
DRAWING
- CORE TECHNOLOGY
- Drap Teaching Trajectory Reproduction Trajectory Prognosis Dynamic Tracking Feeding Distribution Security Monitoring
- SOLUTIONS
- FOODS Personal care Pharmaceuticals Dairy Automotive New Energy PCB 3C
- NEWS
- News & Events
- ABOUT US
- Profile History DISTRIBUTOR Contact

WeChat Official Account

WeChat Channels

24-hour service hotline
0086 18522586451No. 156 Nanhai Road, Binhai New District, Tianjin