D3PM-2200-P25
Introduce
The classic high-speed robot araña industrial configuration has the functional characteristics of translation along the XYZ axis of the three-dimensional space and rotation around the Z axis. By matching with a high-precision machine vision system, it is suitable for high-speed production operations in the food, medicine and other industries. Material assembly, handling, sorting, etc.
Characteristic
1、The standard cycle time is less than 0.67s, meeting your pursuit for the maximum load and maximum space.
2、Advanced design of the rotational motor on moving platform ,enables the robot to be easily achieve high rotation precision.
3、The robot is ideal for high-speed production in food and medicine industry. Widely used in assembly, handling and pick-and-place of heavy materials.
Detailed product parameters
| Model | Axes | Payload | Manipulator | Repeatability | Rotation range | Allowable maximum moment of inertia | Angle range of actuated arm | Power supply | Power capacity | Rated Power | Storage temperature | Work environment | Protection | |||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| D3PM-2200-P25 | 3+1 | 25kg | Weight | Working space diameter | Position | Rotation | ±360º | 0.224kg·㎡ | Up | Down | Three-phase 380VAC -10%~+10%, 49~61HZ | 15KVA | 78.5kw | -10℃~70℃ | -10℃~50℃,RH≤80% | IP55 |
| 153kg | 2200mm | 0.05mm | 0.05º | 33.2º | 78.5º | |||||||||||
Load - frequency
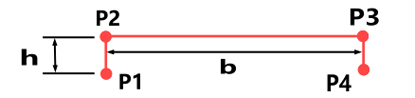
| Name | Loop mode | Movement Distance |
|---|---|---|
| Trajectory1 | P1→P2→ P3→ P4 →P3 →P2 →P1 | h=25, b=305 |
| Trajectory2 | P1→P2→ P3→ P4 →P3 →P2 →P1 | h=25, b=500 |
| Trajectory3 | P1→P2→ P3→ P2 →P1 | h=25, b=305 |
| Trajectory4 | P1→P2→ P3→ P2 →P1 | h=25, b=500 |
Drawing
-
01.Outline dimensions and Working range(mm)
.jpg)
-
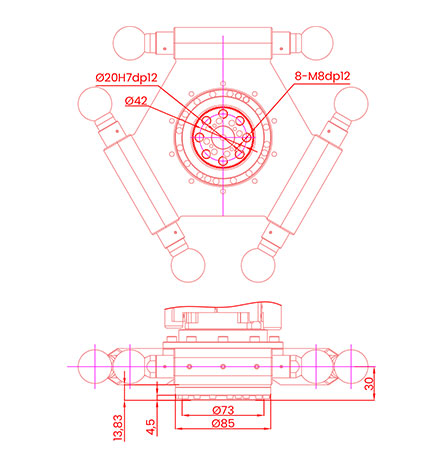
02. Flange(mm)
-
03.Base installation(mm)
.jpg)

.png)